ระบบสัญญาณวิทยุ VOR และการประยุกต์ใช้ในการบินไปตาม LZP การกำหนด MS ระบบวิทยุนำทางระยะสั้น ขั้วต่อด้านหลัง A1
งานที่แก้ไขโดยอุปกรณ์ออนบอร์ดในโหมด "การนำทาง" (ต่อไปนี้จะเรียกว่า "VOR") มีการกำหนดไว้ใน§ 3.1 ภารกิจหลักคือการวัดมุมราบ (ลูกปืนแม่เหล็ก) กับสัญญาณวิทยุ (AM) ได้แก่ มุมในระนาบแนวนอนระหว่างทิศทางของเส้นลมแม่เหล็กที่ผ่านจุดศูนย์ถ่วงของเครื่องบินและทิศทางไปยังสัญญาณวิทยุ .
สัญญาณวิทยุรอบทิศทาง VOR ของระบบระหว่างประเทศเป็นส่วนหนึ่งของระบบนำทางด้วยวิทยุระยะสั้นในแนวราบซึ่งประเทศสมาชิก ICAO นำมาใช้เป็นระบบมาตรฐาน ส่วนแอซิมุธัลประกอบด้วยบีคอนวิทยุ VOR และส่วนเรนจ์ไฟนเดอร์ประกอบด้วย DME (อุปกรณ์วัดระยะทาง ซึ่งหมายถึงอุปกรณ์วัดระยะ)
สัญญาณวิทยุ VORออกแบบมาเพื่อกำหนดข้อมูลเกี่ยวกับมุมราบของเครื่องบิน ทำงานในช่วง 108...117.95 MHz และมีให้เลือกสองเวอร์ชัน: ประเภท A ที่มีระยะสูงสุด 370 กม. และประเภท B สูงสุด 46 กม. ที่ความถี่พาหะ จะส่งสัญญาณอ้างอิงและสัญญาณเฟสแปรผันที่ 30 Hz สัญญาณอ้างอิงเฟสถูกปล่อยออกมาจากเสาอากาศ ซึ่งก่อให้เกิดรูปแบบการแผ่รังสีแบบวงกลม 2 (รูปที่ 3.14) และเฟส (30 Hz) ในทุกทิศทางที่สัมพันธ์กับบีคอนนั้นคงที่ ความถี่พาหะของสัญญาณเฟสอ้างอิงถูกมอดูเลตแอมพลิจูดโดยซับคาริเออร์แรงดันไฟฟ้าที่มีความถี่ 9960 เฮิรตซ์ ซึ่งในทางกลับกันก็ถูกมอดูเลตความถี่ด้วยแรงดันไฟฟ้าที่มีความถี่ 30 เฮิรตซ์ โดยมีการเบี่ยงเบนความถี่ Δf= ±480 เฮิรตซ์
สัญญาณเฟสแปรผันจะถูกปล่อยออกมาจากเสาอากาศ ซึ่งก่อให้เกิดรูปแบบการแผ่รังสี 1 ในรูปเลขแปดและหมุนด้วยความถี่ 30 rps (30 Hz) มันถูกมอดูเลตแอมพลิจูดด้วยแรงดันไฟฟ้า 30 Hz ในระหว่างการหมุนเสาอากาศหนึ่งครั้ง เฟสของสัญญาณเฟสแปรผันจะเปลี่ยนจาก 0 เป็น 360° สัญญาณวิทยุได้รับการปรับเพื่อให้สัญญาณจากการอ้างอิงอยู่ในทิศทางของเส้นลมแม่เหล็กที่ผ่านตำแหน่งที่ติดตั้งสัญญาณวิทยุ คุณของและตัวแปร คุณพีเอฟเฟสเกิดขึ้นใกล้เคียงกัน แต่ในตำแหน่งแอซิมัททัลอื่นๆ จะต่างกันในเฟส รูปแบบการแผ่รังสีเสาอากาศของสัญญาณทั้งสองในอวกาศจะถูกรวมเข้าด้วยกัน ก่อให้เกิดผลลัพธ์ 3 โดยมีรังสีสูงสุดในทิศทาง 1 ไปจนถึงเส้นเมริเดียนแม่เหล็ก ความบังเอิญของเฟสของสัญญาณในทิศทางของเส้นลมแม่เหล็กเป็นจุดเริ่มต้น ในทิศทางนี้การเปลี่ยนเฟส ดฟาเท่ากับศูนย์ในทิศทางอื่น (II-IV)
ข้าว. 3.14. รูปแบบการแผ่รังสีของเสาอากาศบีคอน VOR
แตกต่างกันไปตั้งแต่ 0 ถึง 360 ดังนั้นข้อมูลเกี่ยวกับราบของเครื่องบินจึงอยู่ในการเปลี่ยนเฟสระหว่างสัญญาณอ้างอิงและสัญญาณเฟสแปรผัน AM ราบจะถูกกำหนดโดยความสัมพันธ์ AM = AC ±180°
เพื่อระบุบีคอน VOR ความถี่พาหะจะถูกควบคุมโดยรหัสมอร์สที่มีสัญญาณ 1,020 เฮิร์ตซ์ สัญญาณการโทรสามารถส่งด้วยเสียงโดยใช้การบันทึกแบบแม่เหล็ก นอกจากนี้ ยังสามารถส่งข้อความไปยังเครื่องบินตามความถี่ของผู้ให้บริการได้อีกด้วย
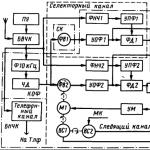
โครงร่างโครงสร้างอุปกรณ์ออนบอร์ดแสดงในรูป 3.15. สัญญาณบีคอน VOR ความถี่สูงเข้าสู่อุปกรณ์ผ่านเสาอากาศ องค์การสหประชาชาติต่อบล็อก บีวีชเคซึ่งใช้แผงควบคุมปรับความถี่ของสัญญาณ VOR ในบล็อก บีวีชเคสัญญาณเฟสอ้างอิงและตัวแปรจะถูกขยาย แปลง และตรวจจับ สัญญาณเฟสแปรผันจะถูกแยกออกจากโหลดของตัวตรวจจับแอมพลิจูด คุณ pfความถี่ 30 Hz, สัญญาณอ้างอิงเฟส คุณของเป็นตัวแทนของการสั่นแบบมอดูเลตความถี่ด้วยความถี่ 9960 เฮิรตซ์ ความถี่แบบมอดูเลตด้วยแรงดันไฟฟ้าที่มีความถี่ 30 เฮิรตซ์ และสัญญาณการรับรู้ที่มีความถี่ 1,020 เฮิรตซ์ พวกเขามาที่บล็อก บีเอ็นเอชเค.ในบล็อก บีเอ็นเอชเคผ่านตัวกรอง 10 kHz และเครื่องตรวจจับความถี่ (บีเอช)สัญญาณถูกเน้นไว้ คุณของความถี่ 30 Hz ซึ่งเข้าสู่การติดตาม (อัตโนมัติ) และผ่านตัวเลือกหลักสูตร (SC) เข้าไปในช่องตัวเลือก (แบบแมนนวล) ช่องเหล่านี้รับสัญญาณด้วย คุณ pfความถี่ 30 เฮิรตซ์ อีกทั้งสัญญาณ คุณของและ คุณ pfใช้ในอุปกรณ์แสดงผล "เปิด-จาก"

ข้าว. 3.15. บล็อกไดอะแกรมของอุปกรณ์ออนบอร์ดในโหมด "VOR"
ช่องทางติดตามวัดราบราบโดยการวัดการเปลี่ยนเฟสระหว่างสัญญาณ คุณของและ คุณ pfความถี่ 30 เฮิรตซ์
องค์ประกอบหลักของช่องสัญญาณคือเครื่องตรวจจับเฟส (วงจรเรียงกระแสแบบไวต่อเฟส) FD2.ผ่านทางเครื่องขยายสัญญาณเฟสอ้างอิง ยูโอเอฟ2มีสัญญาณมาถึง คุณของและมันผ่านตัวเปลี่ยนเฟส FV2,ซึ่งขับเคลื่อนด้วยมอเตอร์ ม1.เฟสของแรงดันเอาต์พุตของตัวเปลี่ยนเฟสนั้นแปรผันตามมุมการหมุนของโรเตอร์ นอกจากนี้แล้วยังต้องใช้เครื่องตรวจจับ FD2มีสัญญาณมาถึง คุณ pfซึ่งถูกเน้นโดยตัวกรอง LPF2และถูกขยายโดยเครื่องขยายสัญญาณเฟสแบบแปรผัน ยูพีเอฟ2.
เครื่องตรวจจับ FD2สร้างแรงดันไฟฟ้า ± ยู y ค่าซึ่งขึ้นอยู่กับการเปลี่ยนเฟสระหว่างสัญญาณ คุณของและ คุณ pfนั่นคือจากราบ AM แรงดันไฟฟ้านี้ถูกแปลงโดยตัวแปลงแรงดันไฟฟ้า จันทร์เป็นความถี่สลับ 400 เฮิรตซ์ของเฟสและแอมพลิจูดที่สอดคล้องกันซึ่งขยายโดยเครื่องขยายกำลังและจ่ายให้กับเครื่องยนต์ ม1- หากดวงอาทิตย์อยู่ในทิศทางของเส้นเมริเดียนแม่เหล็ก เฟสจะเปลี่ยนระหว่างสัญญาณต่างๆ คุณของและ คุณ pfเท่ากับศูนย์ เท่ากับแรงดันไฟฟ้าเป็นศูนย์ ยูเมื่อโหลดเครื่องตรวจจับ FD2,และเครื่องยนต์ไม่ทำงาน ที่ตำแหน่งแอซิมัทอื่นของเครื่องบิน อุปกรณ์ตรวจจับจะสร้างแรงดันไฟฟ้า ± ยูย. ซึ่งแปลงเป็นแรงดันไฟฟ้าที่ความถี่ 400 เฮิรตซ์ และหลังจากขยายสัญญาณจะจ่ายให้กับเครื่องยนต์ ม1.เมื่อหมุนตำแหน่งเชิงมุมของโรเตอร์ตัวเปลี่ยนเฟสจะเปลี่ยนไปซึ่งนำไปสู่การเปลี่ยนแปลงเฟสของสัญญาณ คุณของสิ่งนี้จะเกิดขึ้นจนกว่าเฟสจะตรงกับเฟสของสัญญาณ คุณ pfและแรงดันไฟฟ้า ±คุณจะไม่เท่ากับศูนย์ ดังนั้นมุมการหมุนของเครื่องยนต์ ม1และโรเตอร์ตัวเปลี่ยนเฟสจะเป็นสัดส่วนกับการเปลี่ยนเฟสระหว่างสัญญาณอ้างอิงและสัญญาณเฟสที่แปรผันได้ เช่น อะซิมัท
ข้อมูลราบจากเซ็นเซอร์ พ.ศ.1พิมพ์ BSKT เข้าผ่านตัวเครื่อง ถึงถึงตัวชี้วัด พีเอ็นพี.ในเวลาเดียวกัน มุม CUR ถูกกำหนดในช่องการติดตาม (รูปที่ 3.16, a) โดยการเพิ่ม (ลบ) แนวพีชคณิต AM และส่วนหัว MK (CUR = AM - MK) มีการใช้เซ็นเซอร์ส่วนต่างสำหรับสิ่งนี้ BC2ประเภท BSKT ซึ่งเป็นโรเตอร์ที่เครื่องยนต์หมุนในมุมที่เป็นสัดส่วนกับแอซิมัท AM ขดลวดสเตเตอร์เชื่อมต่อกับเซ็นเซอร์ของระบบทิศทางหรืออุปกรณ์ที่ใช้วัด MK (BGMK-2 - หน่วยเข็มทิศไจโรแมกเนติกของเครื่องบิน Tu-154M และ BSFC-1 - ระบบทิศทางพื้นฐานของเครื่องบิน Yak-42) ในการหมุนของโรเตอร์ของเซ็นเซอร์ BC2แรงดันไฟฟ้าตามสัดส่วนของ CUR ถูกสร้างขึ้นข้อมูลที่ถูกส่งไปยัง RMI (ตัวบ่งชี้คลื่นแม่เหล็กไฟฟ้า) และ PNP-72

ข้าว. 3.16. การกำหนดมุมบังคับเลี้ยว (a) และการบินของเครื่องบินที่มุมราบที่กำหนด (ข)
ช่องตัวเลือก(ดูรูปที่ 3.15) กำหนดความเบี่ยงเบนเชิงมุม (ด้านข้าง) ΔAของเครื่องบินจากแนวเส้นทางที่กำหนด (ผ่านสัญญาณบีคอน (รูปที่ 3.16, ข)ซึ่งตั้งค่าด้วยตนเองโดยแอซิมัท A ด้านหลังที่ระบุ หลักการทำงานขึ้นอยู่กับการเปรียบเทียบแอซิมัท A ของเส้นแทร็กด้านหลังและแอซิมัทปัจจุบันกับบีคอน AM T การเปรียบเทียบนี้เกิดขึ้นในเครื่องตรวจจับ FD1,ซึ่งรับสัญญาณได้ คุณ pfประกอบด้วยข้อมูลเกี่ยวกับราบ AM T ปัจจุบันและสัญญาณ คุณของผ่านทางตัวเปลี่ยนเฟส FV1- มีโครงสร้างอยู่ในตัวเลือกหลักสูตร เอสเค คุณถูกควบคุมโดยปุ่ม “Course” (ดูรูปที่ 3.5) และมีข้อมูลเกี่ยวกับแอซิมัท A ที่ระบุซึ่งอยู่ด้านหลังของแนวลู่ เมื่อเครื่องบินบินไปตามเส้น พีเอพีราบ แอม ทีและก้นก็เหมือนกันและแรงดันไฟฟ้า ±คุณเครื่องตรวจจับ FD1,สัดส่วนกับการเบี่ยงเบน YES เท่ากับศูนย์ เมื่อเครื่องบินเบี่ยงเบน ราบจะเปลี่ยนไป แอม ทีและแรงดันไฟฟ้า ± ยู- สัญญาณเบี่ยงเบน DA ผ่านอุปกรณ์ ถึงไปที่อุปกรณ์ PNP และระบบควบคุมอัตโนมัติ (SAU-42, ABSU-154)
อุปกรณ์ตรวจสอบพารามิเตอร์อย่างต่อเนื่อง(UKP) สร้างสัญญาณความพร้อม "Got.K" ในรูปแรงดันไฟฟ้า +27 V. จ่ายแรงดันไฟฟ้าให้ คุณด้วยเครื่องตรวจจับ FD1และ FD2ตัวเลือกและช่องการติดตามที่มีการเปรียบเทียบและในระหว่างการทำงานปกติของอุปกรณ์ออนบอร์ดสัญญาณ "Get.K" จะถูกส่งออก มันผ่านอุปกรณ์สวิตชิ่ง ถึงไปที่เครื่องปั่น "K" ของอุปกรณ์ PNP, ไฟ "Kl", "K2" ของตัวเลือกโหมด และระบบ AFS "Lily" ของเครื่องบิน Yak-42
อุปกรณ์แสดงผล - "เปิด-จาก"ให้สัญญาณภาพเที่ยวบินเข้าและออกจากประภาคาร มันถูกควบคุมโดยสัญญาณ คุณของตัวเลือกความถี่ 30 Hz (ด้านหลัง) และการติดตาม (เช้าต ) ช่องซึ่งจะถูกลบออกหลังจากตัวเปลี่ยนเฟสของช่องเหล่านี้ เมื่อบินไปยังประภาคาร สัญญาณเหล่านี้จะอยู่ในเฟส และอุปกรณ์จะสร้างแรงดันไฟฟ้าสัญญาณ "เปิด" ในรูปของแรงดันไฟฟ้า +27 V เมื่อบินเหนือประภาคาร ราบ AM จะเปลี่ยน 180° ดังนั้นเฟสของ สัญญาณเปลี่ยนไป คุณของติดตามช่อง 180° และที่อินพุตของสัญญาณ "To-From" ของอุปกรณ์ คุณของทั้งสองช่องสัญญาณจะไม่อยู่ในเฟส โดยจะสร้างแรงดันไฟฟ้าสำหรับการส่งสัญญาณ "จาก" ตัวบ่งชี้ที่ใช้คือไฟ "Na" และ "จาก" (เครื่องบิน Tu-154M) และไฟแสดงทิศทางการบินที่มีสัญลักษณ์ "A" (Na) และ "V" (จาก) ของอุปกรณ์ PNP ในรูปแบบของตัวบ่งชี้แมกนีโตอิเล็กทริกแบบสองขั้ว ดัชนี.
ในบล็อก บีเอ็นเอชเคเครื่องตรวจจับน้ำตกและเฟสแยกกันใช้ในโหมด "VOR" และ "ลงจอด" เมื่อตรวจสอบแนวเส้นทางลงจอดในระบบ SP-50M, SP-68 (ดู§ 3.2) เครื่องตรวจจับเฟสของช่องติดตาม (อัตโนมัติ) ในโหมด "ลงจอด" ใช้ในช่องควบคุมและช่องตัวเลือก (แมนนวล) - ในช่องหลัก การสลับเครื่องตรวจจับทำได้โดยวงจรพิเศษ - สวิตช์ ช่องโทรศัพท์ของโหมด "VOR" เป็นเรื่องปกติกับช่องทิศทางของโหมด "Landing"
หากต้องการใช้อุปกรณ์ออนบอร์ดในโหมด "VOR" ความถี่บีคอนของ VOR จะถูกตั้งค่าบนแผงควบคุม และป้อนราบที่ต้องการของเส้นเส้นทางที่กำหนดโดยใช้ตัวเลือกหลักสูตร
ออกแบบมาเพื่อสร้างสัญญาณนำทางในอวกาศด้วยข้อมูล:
เกี่ยวกับมุมราบของจุดใดๆ ในพื้นที่ครอบคลุมที่สัมพันธ์กับเส้นลมแม่เหล็ก
เกี่ยวกับการเบี่ยงเบนของเครื่องบินจากทิศทางที่กำหนด
ตัวบ่งชี้ “จาก-ถึง” ซึ่งระบุทิศทางการบิน
สัญญาณประจำตัว (รหัสมอร์ส)
ข้อความเสียง (ช่วงมิเตอร์) 960-1215 MHz
สัญญาณวิทยุ VHF ราบรอบทิศทางภาคพื้นดิน (RMA) ได้รับการออกแบบมาเพื่อวัดมุมราบของเครื่องบินโดยสัมพันธ์กับตำแหน่งของสัญญาณในระหว่างการบินของเครื่องบินตามเส้นทางและในพื้นที่สนามบิน
อากาศยานจะใช้ RMA ในการเข้าถึงอุปกรณ์หากระบบเสาอากาศ RMA ถูกปรับตามแนวเส้นลมแม่เหล็ก และ RMA ตั้งอยู่บนเส้นกึ่งกลางของทางวิ่ง (ต่อไปนี้จะเรียกว่าทางวิ่ง) (ในแนวแนวทางวิ่ง) หรืออยู่ห่างจากทางวิ่ง จากเส้นกลาง แต่เมื่อเป็นดังนี้:
หากลู่วิ่งสุดท้ายตัดกันด้วยเส้นกึ่งกลางทางวิ่งที่ขยายออก จุดตัดกันจะต้องอยู่ห่างจากเกณฑ์ทางวิ่งอย่างน้อย 1,400 เมตร และมุมทางแยกจะต้องไม่เกิน 30° สำหรับขั้นตอนการร่อนลงสำหรับเครื่องบินประเภท A, B และ 15° สำหรับรูปแบบอื่นๆ
หากลู่วิ่งสุดท้ายไม่ตัดกับเส้นกึ่งกลางทางวิ่งที่ขยายออกไปก่อนถึงหัวทางวิ่ง มุมระหว่างทางวิ่งสุดท้ายกับเส้นกึ่งกลางทางวิ่งที่ขยายออกจะต้องน้อยกว่า 5° และที่ระยะ 1,400 เมตร จากธรณีประตูทางวิ่ง รางสุดท้าย วิธีการลงจอดจะต้องอยู่ห่างจากส่วนต่อขยายของเส้นกึ่งกลางทางวิ่งไม่เกิน 150 เมตร
หมายเหตุ: RMA จะถือว่าอยู่ในแนวแนวทางวิ่ง หากมุมรางแม่เหล็ก (MAF) ของแนวทางตรงสุดท้ายแตกต่างจาก MPA ของทางวิ่งที่ใช้สำหรับการลงจอดในมุมไม่เกิน ±5°
RMA, RMD และ RMA/RMD จะต้องวางไว้บนเส้นทางหรือสนามบินตามข้อกำหนดของเอกสารทางเทคนิคสำหรับอุปกรณ์ประเภทนี้ ในลักษณะที่รับประกันว่าจะแก้ไขปัญหาการนำทางได้สูงสุด ตำแหน่งของ RMA จะต้องได้ระดับหรือมีความลาดชันไม่เกิน 4% ที่ระยะห่างจากประภาคารไม่เกิน 400 เมตร ตำแหน่งการติดตั้ง RMA ควรอยู่ห่างจากรั้วและเส้นลวดเหนือศีรษะให้มากที่สุดเท่าที่จะเป็นไปได้ โดยความสูงควรอยู่ที่มุมไม่เกิน 0.5 องศา สัมพันธ์กับศูนย์กลางของเสาอากาศ โครงสร้างไม่ควรอยู่ใกล้ตำแหน่งเกิน 150 ม. และมีมุมเงยมากกว่า 1.2 องศา อุปกรณ์เสาอากาศ RMD ต้องอยู่เหนืออุปกรณ์เสาอากาศของบีคอน RMA เมื่อใช้ทรานสปอนเดอร์ RMD ร่วมกับบีคอน RMA อนุญาตให้แยกอุปกรณ์เสาอากาศ RMD และ RMA ได้ในระยะไม่เกิน 30 เมตร เมื่อรองรับเที่ยวบินในบริเวณสนามบิน และไม่เกิน 600 เมตร เมื่อรองรับเที่ยวบินตามเส้นทางการบิน
สัญญาณวิทยุ azimuthal VOR (РМА-90) เป็นอุปกรณ์ภาคพื้นดินสำหรับระบบนำทางอากาศยาน azimuthal ในช่วงคลื่นเมตรที่มีรูปแบบสัญญาณ VOR และ ICAO แนะนำให้ใช้เป็นวิธีหลักในการวัดราบในเส้นทางการบินหรือเป็น วิธีเพิ่มเติมในการรับรองการเข้าใกล้และการลงจอดของเครื่องบินการบินพลเรือน ( GA) (РМА-90) ได้รับการออกแบบมาเพื่อสร้างสัญญาณนำทางเชิงพื้นที่ที่มีข้อมูลเกี่ยวกับมุมราบของจุดใดๆ ในพื้นที่ครอบคลุมที่สัมพันธ์กับจุดติดตั้งสัญญาณวิทยุ และสัญญาณระบุสัญญาณวิทยุ
เมื่ออุปกรณ์บนเครื่องบินรับสัญญาณจาก VOR สองตัวพร้อมกัน จะสามารถกำหนดตำแหน่งของเครื่องบินได้ ซึ่งต้องใช้แผนที่และความรู้เกี่ยวกับตำแหน่งของบีคอนวิทยุ VOR สามารถใช้ร่วมกับบีคอนเรนจ์ไฟนเดอร์ DME/N ได้ ในกรณีนี้ หากมีอุปกรณ์ค้นหาระยะที่เหมาะสมบนเครื่องบิน สัญญาณวิทยุ VOR/DME ที่รวมกันหนึ่งสัญญาณก็เพียงพอที่จะระบุตำแหน่งของเครื่องบินในระบบพิกัดเชิงขั้วของช่วงแอซิมัท
หลักการทำงาน
สัญญาณอ้างอิงเฟสแบบมอดูเลตความถี่แอมพลิจูดถูกแผ่โดยเสาอากาศรอบทิศทางคงที่ สัญญาณเฟสแปรผันแบบมอดูเลตแบบแอมพลิจูดที่มีความถี่ 30 เฮิรตซ์ ปล่อยออกมาจากเสาอากาศแบบหมุน (30 รอบต่อนาที) ที่มีรูปแบบการแผ่รังสีรูปแปดในแปด
รูปแบบทิศทางที่พับในอวกาศก่อให้เกิดสนามของแอมพลิจูดที่แปรผัน ซึ่งเปลี่ยนแปลงด้วยความถี่ 30 เฮิรตซ์ สัญญาณ VOR ได้รับการวางตำแหน่งเพื่อให้ระยะของสัญญาณอ้างอิงและสัญญาณสลับตรงกันในทิศทางของเส้นลมปราณแม่เหล็กเหนือ ในขณะที่รูปแบบการแผ่รังสีของสนามหมุนสูงสุดมุ่งตรงไปที่นั่น ความถี่ของสัญญาณซับคาริเออร์จะมีค่าสูงสุด (1,020 Hz) ในทิศทางอื่น การเปลี่ยนเฟสจะแตกต่างกันไปตั้งแต่ศูนย์ถึง 360 องศา ด้วยวิธีที่เรียบง่าย คุณสามารถนึกถึง VOR ว่าเป็นสัญญาณวิทยุที่ส่งสัญญาณของตัวเองในแต่ละทิศทาง จำนวน "สัญญาณแอซิมัท" ดังกล่าวถูกกำหนดโดยความไวของอุปกรณ์บนเครื่องบินต่อขนาดของการเปลี่ยนเฟสเท่านั้น ซึ่งเป็นสัดส่วนโดยตรงกับราบปัจจุบันของเครื่องบินที่สัมพันธ์กับบีคอนวิทยุ ในบริบทนี้ แทนที่จะใช้แนวคิด "ราบราบ" จะใช้คำว่ารัศมี (VOR Radials) เป็นที่ยอมรับกันโดยทั่วไปว่าจำนวนรัศมีคือ 360 จำนวนรัศมีเกิดขึ้นพร้อมกับค่าตัวเลขของราบแม่เหล็ก
ลักษณะทางเทคนิคหลักของ VOR (РМА-90)
ความคุ้มครอง:
ในระนาบแนวนอนตั้งแต่ 0 ถึง 360
ในระนาบแนวตั้ง (สัมพันธ์กับพื้นผิวของแนวสายตาที่จำกัด) องศาไม่เกิน 3
จากด้านล่างองศาไม่ต่ำกว่า 40
จากด้านบนลูกเห็บในระยะไม่ต่ำกว่า 300
ที่ระดับความสูง 12,000 ม. อย่างน้อย 100 กม
ที่ระดับความสูง 6,000 ม. (ที่ครึ่งกำลัง) กม
โพลาไรเซชันของรังสีในแนวนอน
ข้อผิดพลาดของข้อมูลเกี่ยวกับราบที่จุดที่ระยะ 28 เมตรจากศูนย์กลางเสาอากาศ องศาไม่เกิน 1
ความถี่ช่องสัญญาณทำงาน (การแกว่งของผู้ให้บริการ) หนึ่งในค่าที่ไม่ต่อเนื่องในช่วง 108.000-117.975 MHz ที่ 50 kHz
พลังสั่นสะเทือนของผู้ให้บริการ (ปรับได้), W ตั้งแต่ 20 ถึง 100
ขนาดและน้ำหนักโดยรวมของตู้ RMA 496x588x1724 มม. ไม่เกิน 200 กก
ตะแกรงเสาอากาศ RMA เส้นผ่านศูนย์กลาง 5000 มม
น้ำหนักเสาอากาศ RMA
ไม่มีตะแกรง 130 กก
บีคอนวิทยุ เช่นเดียวกับบีคอนทั่วไป ใช้สำหรับการนำทางและระบุตำแหน่งของเรือ เพื่อกำหนดทิศทางไปยังสัญญาณวิทยุ นักบินจำเป็นต้องมีเข็มทิศวิทยุ
กปปส. และ ว.อ
น.ดี.บี. (บีคอนแบบไม่มีทิศทาง) – สถานีวิทยุขับเคลื่อน (PRS) – สัญญาณวิทยุที่ทำงานบนคลื่นกลางในช่วง 150-1750 kHz เครื่องรับวิทยุ AM-FM ในบ้านที่ง่ายที่สุดสามารถรับสัญญาณจากบีคอนดังกล่าวได้
ผู้อยู่อาศัยในเซนต์ปีเตอร์สเบิร์กสามารถปรับเครื่องรับให้เป็นความถี่ 525 kHz และได้ยินรหัสมอร์ส: "PL" หรือ dot-dash-dash-dot, dot-dash-dot-dot นี่คือสัญญาณวิทยุ NDB ท้องถิ่นที่ต้อนรับเราจากปูลโคโว
เพื่อนร่วมงานคนหนึ่งของ Virpil ซึ่งเปรียบเทียบหลักการทำงานของบีคอน NDB และ VOR ให้การเปรียบเทียบที่น่าสนใจ ลองนึกภาพว่าคุณและเพื่อนหลงอยู่ในป่า เพื่อนของคุณตะโกนว่า “ฉันอยู่นี่!” คุณกำหนดทิศทางของเสียง: เมื่อพิจารณาจากเข็มทิศ ราบคือ 180 องศา นี่คือเอ็นดีบี
แต่ถ้าเพื่อนของคุณตะโกน:“ ฉันอยู่นี่ - รัศมีเป็น 0 องศา!” ตอนนี้นี่คือ VOR
ว.อ (ช่วงวิทยุรอบทิศทาง VHF) – สัญญาณวิทยุอะซิมุธัลรอบทิศทาง (RMA) ซึ่งทำงานที่ความถี่ในช่วง 108 – 117.95 MHz
NDB ส่งสัญญาณเดียวกันในทุกทิศทาง และ VOR จะออกอากาศข้อมูลเกี่ยวกับมุมระหว่างทิศทางไปทางเหนือและทิศทางไปยังเครื่องบินที่สัมพันธ์กับตัวเองหรืออีกนัยหนึ่ง - RADIAL

ไม่ชัดเจน? เอาเป็นว่าอีกวิธีหนึ่ง VOR ในแต่ละทิศทางห่างจากตัวมันเอง ตั้งแต่ 0 ถึง 360 องศา จะปล่อยสัญญาณที่เป็นเอกลักษณ์ พูดคร่าวๆ ก็คือ 360 สัญญาณเป็นวงกลม แต่ละสัญญาณจะมีข้อมูลเกี่ยวกับมุมราบของจุดใดๆ ที่สัมพันธ์กับบีคอนที่รับสัญญาณนี้ สัญญาณลำแสงเหล่านี้เรียกว่ารัศมี ไปทางเหนือส่งสัญญาณ 0 (ศูนย์) องศา ไปทางทิศใต้ – 180 องศา
 หากเครื่องรับ AM/FM มือสมัครเล่นของคุณสามารถรับความถี่ VOR และถอดรหัสได้ เมื่อได้รับสัญญาณดังกล่าว คุณจะได้ยิน: “ฉันเป็นสัญญาณ SPB รัศมี 90 องศา” ซึ่งหมายความว่าร่างกายของคุณตั้งอยู่ทางทิศตะวันออกจากประภาคารอย่างเคร่งครัด - 90 องศา ซึ่งหมายความว่าหากคุณไปทางทิศตะวันตกอย่างเคร่งครัด - มุ่งหน้าไปที่ 270 องศา - ไม่ช้าก็เร็วคุณจะเห็นประภาคารแห่งนี้อยู่ตรงหน้าคุณ
หากเครื่องรับ AM/FM มือสมัครเล่นของคุณสามารถรับความถี่ VOR และถอดรหัสได้ เมื่อได้รับสัญญาณดังกล่าว คุณจะได้ยิน: “ฉันเป็นสัญญาณ SPB รัศมี 90 องศา” ซึ่งหมายความว่าร่างกายของคุณตั้งอยู่ทางทิศตะวันออกจากประภาคารอย่างเคร่งครัด - 90 องศา ซึ่งหมายความว่าหากคุณไปทางทิศตะวันตกอย่างเคร่งครัด - มุ่งหน้าไปที่ 270 องศา - ไม่ช้าก็เร็วคุณจะเห็นประภาคารแห่งนี้อยู่ตรงหน้าคุณ
คุณสมบัติที่สำคัญที่สุดของ VOR สำหรับเราคือความสามารถในการนำร่องไปยังแหล่งสัญญาณของบีคอนนี้โดยอัตโนมัติตามเส้นทางที่เลือก ในการดำเนินการนี้ เครื่องรับการนำทางจะถูกปรับไปที่ความถี่สัญญาณวิทยุ และเลือกเส้นทางเข้าใกล้บนแผงระบบอัตโนมัติ

จะกำหนดระยะห่างจากประภาคารได้อย่างไร? ต้องใช้เวลานานเท่าใดจึงจะไปถึงที่นั่น? นั่นคือสิ่งที่ DME มีไว้เพื่อ
ดีเอ็มอี (อุปกรณ์วัดระยะทาง) – สัญญาณวิทยุแบบกระจายรอบทิศทางหรือ RMD หน้าที่ของเขาคือให้ข้อมูลเกี่ยวกับระยะห่างระหว่างเขากับเครื่องบินของเรา
โดยปกติแล้ว DME จะรวมกับ VOR และสะดวกมากที่จะมีข้อมูลเกี่ยวกับตำแหน่งของเราที่สัมพันธ์กับบีคอนและระยะห่างจากบีคอน เท่านั้น เพื่อกำหนดระยะทางนี้ เครื่องบินจะต้องส่งสัญญาณคำขอ DME ตอบกลับ และอุปกรณ์ออนบอร์ดจะคำนวณระยะเวลาที่ผ่านไประหว่างการส่งคำขอและรับการตอบกลับ ทุกอย่างเกิดขึ้นโดยอัตโนมัติ
VOR/DME มีประโยชน์อย่างมากเมื่อลงจอด
ไอแอลเอส
ระบบสนามและเส้นทางร่อน - ILS นี่คือระบบนำทางด้วยวิทยุ บางทีร้อยละ 90 ของสนามบินที่มีเครื่องบินขนาดใหญ่เช่นแผ่นดินของเราติดตั้งอยู่
ILS ควรเป็นที่รู้จักในนาม “พระบิดาของเรา” ILS ทำให้การลงจอดไม่เพียงแต่สะดวกสบาย แต่ยังปลอดภัยอีกด้วย มีสนามบินหลายแห่งที่วิธีการลงจอดแบบอื่นเป็นไปไม่ได้หรือยอมรับไม่ได้ด้วยซ้ำ
จากชื่อของระบบ จะเป็นไปตามนั้น เครื่องบินจะปรับแนวให้ตรงกับแกนของทางวิ่ง (ระบบส่วนหัว) โดยอัตโนมัติ และจะเข้าสู่เส้นทางเครื่องร่อนและรักษาไว้โดยอัตโนมัติ (ระบบเส้นทางเครื่องร่อน)
มีบีคอนวิทยุสองตัวติดตั้งอยู่บนพื้น: เครื่องระบุตำแหน่งและทางลาดร่อน


สัญญาณหลักสูตร– เคอาร์เอ็ม – ( โลคัลไลเซอร์) ชี้เครื่องบินไปทางรันเวย์ในระนาบแนวนอน นั่นคือ ตามแนวเส้นทาง
ประภาคารเส้นทางร่อน– สายพานไทม์มิ่ง – ( ร่อนลงหรือ Glidepath) นำเครื่องบินขึ้นสู่รันเวย์ในระนาบแนวตั้ง - ตามแนวเครื่องร่อน
เครื่องหมายวิทยุ
บีคอนเครื่องหมายเป็นอุปกรณ์ที่ช่วยให้นักบินสามารถกำหนดระยะห่างจากรันเวย์ได้ บีคอนเหล่านี้จะส่งสัญญาณขึ้นด้านบนเป็นลำแสงแคบ และเมื่อเครื่องบินบินผ่านเครื่องบินโดยตรง นักบินก็รู้เรื่องนี้
เครื่องช่วยนำทางหลักในประเทศส่วนใหญ่คือ ว.อ(ระบบนำทาง VHF OmniDirectional Range) ซึ่งแปลเป็นภาษารัสเซียเรียกว่า เครื่องระบุตำแหน่งรอบทิศทาง VHF- ระบบนำทางด้วยดาวเทียมที่ปรากฏเมื่อเร็ว ๆ นี้ไม่ได้แทนที่ VOR แต่เป็นส่วนเสริม
เครื่องบินบินไปตามสายการบินที่สร้างขึ้นจากส่วนต่างๆ ส่วนต่างๆ ก่อตัวเป็นเครือข่ายที่พันกันทั้งรัฐ สถานีวิทยุ VOR ตั้งอยู่ที่โหนดของเครือข่ายนี้ (ที่ส่วนท้ายของส่วน)
สัญญาณวิทยุ VORประกอบด้วยเครื่องส่งสัญญาณสองตัวที่ความถี่ 108.00-117.95 เมกะเฮิรตซ์- เครื่องส่ง VOR เครื่องแรกจะส่งสัญญาณคงที่ในทุกทิศทาง ในขณะที่เครื่องส่ง VOR เครื่องที่สองส่งสัญญาณอยู่ ลำแสงหมุนแคบโดยการเปลี่ยนเฟสขึ้นอยู่กับมุมการหมุน กล่าวคือ ลำแสงจะวิ่งเป็นวงกลม 360 องศา (เหมือนลำแสงประภาคาร) ผลลัพธ์ที่ได้คือรูปแบบรังสีในรูปของรังสี 360 รังสี (รังสีหนึ่งรังสีผ่านแต่ละองศาของวงกลม) อุปกรณ์รับสัญญาณจะเปรียบเทียบสัญญาณทั้งสองและกำหนด "มุมลำแสง" ที่เครื่องบินอยู่ในปัจจุบัน มุมนี้เรียกว่ารัศมี VOR
อุปกรณ์ VOR บนเครื่องบินสามารถระบุได้ว่ารัศมี VOR ใดของสถานีวิทยุที่ทราบว่าเครื่องบินนั้นเปิดอยู่

คุณสามารถค้นหาสถานี VOR ที่ต้องการได้บนแผนที่เที่ยวบิน แผนภาพด้านบนแสดงเครื่องบินในรัศมี 30 จาก VOR VOR แต่ละอันมีของตัวเอง ชื่อ(VOR ในภาพเรียกว่า KEMPTEN VOR) และ ตัวย่อสามตัวอักษร(VOR แทนด้วย KPT ในรูป) ถัดจาก VOR จะมีการเขียนความถี่ซึ่งจะต้องป้อนลงในเครื่องรับ ดังนั้นในการรับสัญญาณจาก KEMPTEN VOR คุณต้องป้อนความถี่ 109.60 ลงในเครื่องรับ
บ่อยครั้งที่เครื่องบินไม่ได้ติดตั้งเครื่องรับ VOR ไม่ใช่เครื่องเดียว แต่มีเครื่องรับ VOR สองตัว ในกรณีนี้เครื่องรับหนึ่งตัวเรียกว่า NAV 1 และตัวที่สองตามลำดับคือ NAV 2 หากต้องการป้อนความถี่ลงในเครื่องรับ VOR ให้ใช้ปุ่มกลมคู่ ส่วนใหญ่ใช้เพื่อป้อนจำนวนเต็ม ส่วนที่เล็กกว่าจะใช้เพื่อป้อนการแบ่งเศษส่วนของความถี่ VOR แผงควบคุมการนำทางด้วยวิทยุทั่วไปจะแสดงอยู่ด้านล่าง

หลักความถี่ VOR จะมีป้ายกำกับเป็นสีแดง นี่คือประเภทเครื่องรับที่ง่ายที่สุดที่ให้คุณป้อนความถี่ VOR ได้เพียงความถี่เดียวเท่านั้น ระบบที่ซับซ้อนมากขึ้นทำให้คุณสามารถป้อนความถี่ VOR สองความถี่พร้อมกันและสลับระหว่างความถี่เหล่านี้ได้อย่างรวดเร็ว ความถี่ VOR หนึ่งความถี่คือ ไม่ได้ใช้งาน(STAND BY) ก็เปลี่ยนตามที่จับ ตัวตั้งความถี่- ความถี่ VOR ที่สองเรียกว่า คล่องแคล่ว(ACTIVE) นี่คือความถี่ VOR ที่เครื่องรับปรับอยู่ในปัจจุบัน

รูปด้านบนแสดงตัวอย่างเครื่องรับที่มีความถี่หลัก VOR สองตัว ใช้งานง่ายมาก: คุณต้องป้อนความถี่ VOR ที่ต้องการโดยใช้ปุ่มหมุนกลม จากนั้นเปิดใช้งานโดยใช้สวิตช์ เมื่อคุณเลื่อนเมาส์ไปเหนือล้อตัวเลือก เคอร์เซอร์ของเมาส์จะเปลี่ยนรูปร่าง หากดูเหมือนลูกศรเล็ก ๆ เมื่อคุณคลิกเมาส์ ส่วนที่สิบจะเปลี่ยนไป หากลูกศรมีขนาดใหญ่ ตัวเลขทั้งส่วนก็จะเปลี่ยนไป
นอกจากนี้ควรมีอุปกรณ์ในห้องนักบินที่แสดงว่าเครื่องบินอยู่ในรัศมี VOR ใด โดยปกติแล้วอุปกรณ์นี้เรียกว่า NAV 1 หรือ VOR 1 ตามที่เราทราบแล้วว่าเครื่องบินอาจมีอุปกรณ์ดังกล่าวชิ้นที่สอง มีสองตัวบน Cessna 172:

อุปกรณ์ประกอบด้วย:
มาตราส่วนที่สามารถเคลื่อนย้ายได้คล้ายกับมาตราส่วนเข็มทิศ
ปุ่มหมุน OBS แบบกลม
ลูกศรชี้ทิศทาง TO-FROM
แบนเนอร์ จีเอส
สองแถบแนวตั้งและแนวนอน
แถบแนวนอนและแบนเนอร์ GS ใช้สำหรับการลงจอดของ ILS
ปุ่ม OBS จะหมุนสเกลเลื่อน และด้วยเหตุนี้จึงปรับตัวรับ VOR ให้เป็นรัศมีที่ต้องการ ตัวอย่างเช่น นี่คือลักษณะของอุปกรณ์เมื่อปรับเป็นรัศมี 30:

รูปภาพแสดงให้เห็นว่าเมื่อคุณหมุนปุ่ม OBS สเกลจะหมุน และมุมด้านบนจะชี้ไปที่จำนวนรัศมีปัจจุบัน เช่นเดียวกับเข็มทิศ ตัวเลขทั้งหมดบนอุปกรณ์เขียนหารด้วย 10 ดังนั้นเลข 3 จึงหมายถึง รัศมี 30.
แถบแนวตั้งแสดงความเบี่ยงเบนจากรัศมี หากระนาบอยู่บนแนวรัศมี แถบจะอยู่ในแนวตั้ง:

หากเครื่องบินเคลื่อนไปทางขวาของรัศมี แถบแนวตั้งจะเบี่ยงเบนไปทางซ้ายเพื่อระบุว่าคุณควรบินไปทางด้านซ้ายของรัศมี

เมื่อนักบินเห็นภาพดังกล่าว เขารู้ว่าเมื่อจะเข้าสู่รัศมีนั้นจะต้องเลี้ยวซ้าย กฎนั้นง่ายมาก: แถบจะแสดงในทิศทางที่คุณต้องการบิน
รูปภาพที่คล้ายกันจะปรากฏขึ้นหากระนาบอยู่ทางด้านซ้ายของรัศมีที่ต้องการ:

โปรดทราบว่าในกรณีนี้ ระนาบเบี่ยงเบนไปจากรัศมีมากขึ้นและแถบเครื่องมือก็เบี่ยงเบนมากขึ้นเช่นกัน
คุณลักษณะที่สำคัญของ VOR ก็คือ อุปกรณ์จะแสดงรัศมีที่เครื่องบินตั้งอยู่เสมอ โดยไม่คำนึงถึงทิศทางที่เครื่องบินกำลังเดินทางอยู่ ตัวอย่างเช่น รูปภาพด้านล่างแสดงเครื่องบินที่บินในเส้นทางต่างๆ เนื่องจากพวกมันอยู่บนรัศมีเดียวกันและมีการตั้งค่า OBS เหมือนกัน VOR ของเครื่องบินทุกลำจึงจะแสดงสิ่งเดียวกัน

เมื่อบินโดย VOR คุณต้องจำไว้ว่าความไวของอุปกรณ์ VOR จะเพิ่มขึ้นเมื่อคุณเข้าใกล้สัญญาณ VOR จนกระทั่งหายไปในบริเวณใกล้เคียงกับสัญญาณ ใกล้กับสัญญาณ VOR ไม่จำเป็นต้องไล่ตามคาน แต่เมื่อความไวมากเกินไป คุณควรเคลื่อนที่ต่อไปในเส้นทางเดิมจนกว่าเครื่องบินจะผ่านสัญญาณ VOR
ดังนั้น, เพื่อบินไปตามรัศมี VORคุณต้องตั้งค่าความถี่ VOR บนเครื่องรับ กำหนดจำนวนรัศมีที่ต้องการโดยใช้ OBS และถือแถบแนวตั้งไว้ที่กึ่งกลางของอุปกรณ์ หากแถบเบี่ยงเบนไปทางซ้าย คุณต้องเลี้ยวไปทางซ้าย ถ้าไปทางขวาก็ต้องเลี้ยวขวา ในกรณีที่มีลมพัดผ่าน คุณจะต้องเลี้ยวเป็นลมเพื่อชดเชยการดริฟท์ของเครื่องบิน คุณสามารถอ่านเพิ่มเติมเกี่ยวกับการบินสู่สายลมได้ในบทความเกี่ยวกับ